研究テーマ
部分空間制御法とその応用
多自由度系の振動解析を行う手法として「モード解析」があります. 多自由度振動系では,自由度の数だけ「固有振動数」が存在し,それぞれでは振動パターンが決まっています.この振動パターンは「固有モード」と呼ばれます. 「モード解析」とは,それぞれの質点の変位を用いて表されていた運動方程式を,それぞれの固有モードに分離して解析する手法です.
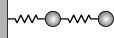
Fig.1 2自由度振動系
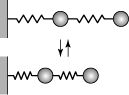
Fig.2 1次モード
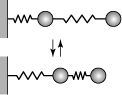
Fig.3 2次モード
図1に示すような2自由度系を用いて説明しましょう. 2自由度系には2つの固有振動数が存在します. 固有振動数が小さいものを1次,大きいものを2次とすると,それぞれの振動パターンである固有モードは図2,図3のようになります. 1次は2つの質点が同じ方向に振動するモード,2次は2つの質点が互いに逆向きに振動するモードです. モード解析では,1次モードと2次モードの重ね合わせとして質点の運動を表現します.
こうすると何がうれしいのでしょう? 質点の変位で運動方程式を表すと,2つの質点の変位はお互いに影響し合います(連成しているといいます). 運動方程式が連立方程式になってしまうわけです.
一方,モードで表すとどうなるでしょう? モードの直交性という性質から,2つのモードは連成しません. だから,運動方程式が連立方程式にならず,簡単になるわけです.
ちょっと難しくなりますが,モード解析を数学的に少し拡張すると,「固有振動数」は「固有値」,「固有モード」は「固有ベクトル」という概念に置き換えられます.
さて,いよいよ部分空間制御について説明します. 制御とは系の状態を目的の状態に維持することです. そのために,系の状態量(変位や速度)をフィードバックするフィードバック制御がよく用いられています. ここにモード解析の概念を適用すると,制御が必要なモードと不要なモードに分けることができます. こうすることで,制御系設計を容易にしたり,より緻密な制御が可能となります. この制御手法を私たちは部分空間制御と呼んで,研究を行っています.
例として,以下のようなモデルを取り扱っています.
- 倒立振子の振り上げ安定化制御
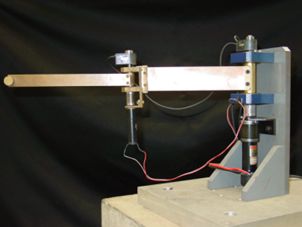
- フレキシブルアームの運動制御
- クレーンの振れ止め制御

|
|
|
| Fig.4 並列二重倒立振子実験装置 | Fig.5 フレキシブルアーム実験装置 |
