研究テーマ
自励振動を利用した受動型動的二足歩行
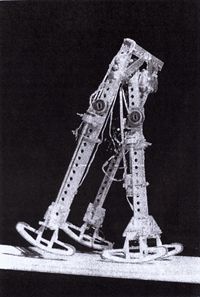
Fig.1 Tad McGeer の実験装置

Fig.2 はりねずみのおもちゃ
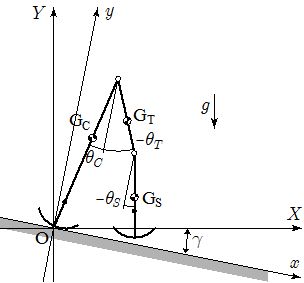
Fig.3 解析モデル
ロボットの二足歩行については多くの研究がなされており,ホンダのASIMOのように実際に2本の足で歩いたり走ったりするロボットも存在します. ASIMOは取り付けられた様々なセンサーで状態を把握し,足の関節に取り付けられたアクチュエータを駆動することで歩行しています. このように関節をアクチュエータによって駆動して行う歩行を能動型歩行と呼びます.
この研究テーマで取り扱う二足歩行は,能動型の歩行ではなく,受動型の歩行です. 図1には,Tad McGeer が1990年に製作した受動型動的二足歩行の実験装置を示しています. 関節を駆動するようなアクチュエータはありませんが,わずかに傾斜した坂道を,2組の脚を交互に振り出して歩行します.
アクチュエータもないのに,床がわずかに傾いているだけでこのような運動が可能になるのはなぜでしょう? これは自励振動と呼ばれる振動現象であり,2組の脚が交互に振り子のように揺れる運動が,重力のエネルギーによって安定的に継続しているのです.
同様な現象として,図2に示すようなおもちゃを見たことがあるでしょう. このおもちゃは前後に振動しつつ,前足と後ろ足の間隔を広げたり狭めたりして,坂道を下ります.
図3には膝がある場合の受動型動的二足歩行の解析モデルを示します. このような解析モデルを考え,数値計算を用いて,運動の解明を行います. 図4には数値計算によって求めた,歩行のシミュレーション結果を示しています.
この研究テーマは,受動型動的二足歩行を自励振動としてとらえてモデル化し,数値解析と実験によって運動の特徴を明らかにすることを目的としています. あわせて,図2に示したようなおもちゃの運動メカニズムも検討します.
Fig.4 シミュレーション結果
